MIT
MECH
E
Biomimetic Robotics Lab
Home
People
Research
Publications
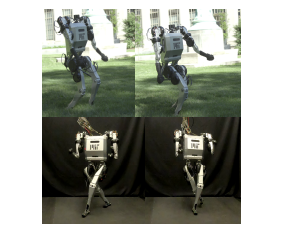
Research
Running, jumping, turning, flipping: our research is pushing the boundary of what's possible with legged robotics.
Refine Results
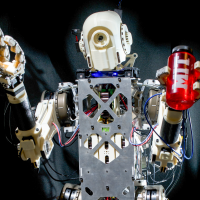
Reflexive Control for Manipulation
Read Article
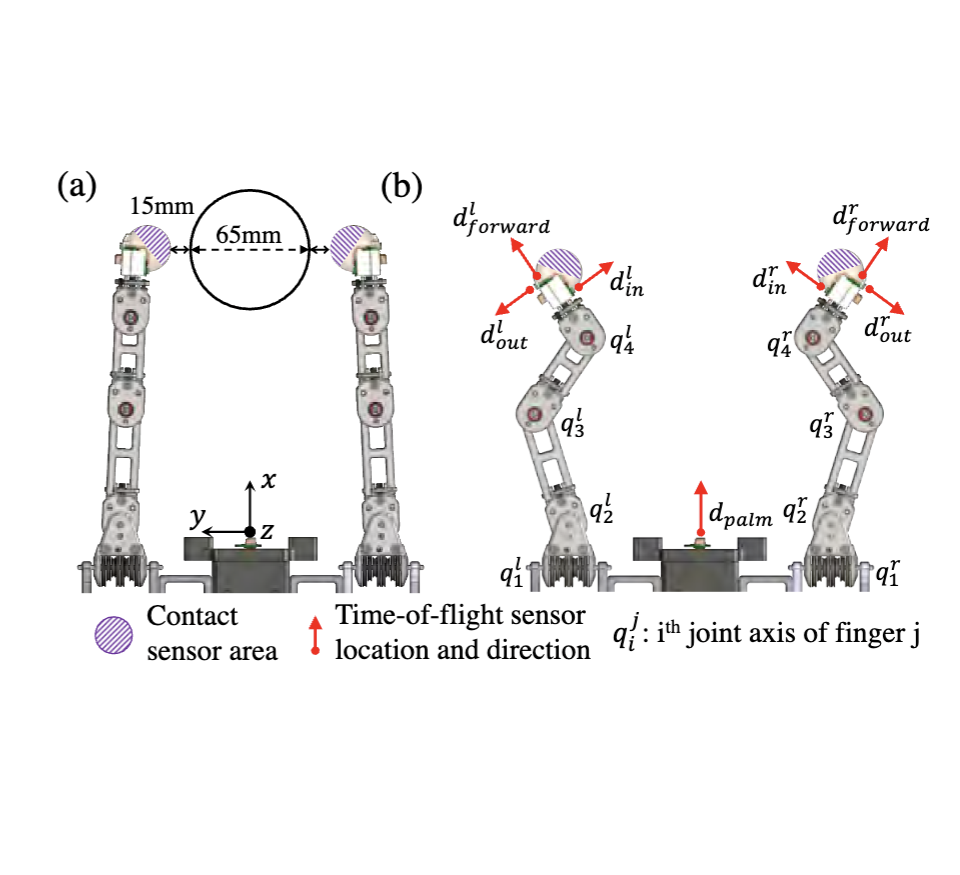
Sensor Design for Manipulation
Read Article
Tailoring Solution Accuracy for Fast Whole-body Model Predictive Control of Legged Robots
Read Article
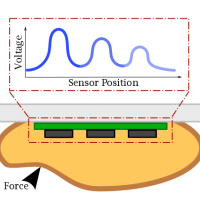
Design Principles for Multi-Axis, Large Force Magnitude Sensor Arrays for Use in Human and Robotic Applications
Read Article
Optimal Actuator Design
Read Article
Archived Projects
Read Article